Motores
eléctricos

Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de campos magnéticos variables electromagnéticas. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en energía eléctrica funcionando como generadores. Los motores eléctricos de tracción usados en locomotoras realizan a menudo ambas tareas, si se los equipa con frenos regenerativos.
Son ampliamente utilizados en instalaciones industriales, comerciales y particulares. Pueden funcionar conectados a una red de suministro eléctrico o a baterías. Así, en automóviles se están empezando a utilizar en vehículos híbridos para aprovechar las ventajas de ambos.
Principio de funcionamiento
Los motores de corriente alterna y los de corriente continua se basan en el mismo principio de funcionamiento, el cual establece que si un conductor por el que circula una corriente eléctrica se encuentra dentro de la acción de un campo magnético, éste tiende a desplazarse perpendicularmente a las líneas de acción del campo magnético.
El conductor tiende a funcionar como un electroimán debido a la corriente eléctrica
que circula por el mismo adquiriendo de esta manera propiedades
magnéticas, que provocan, debido a la interacción con los polos ubicados
en el estátor, el movimiento circular que se observa en el rotor
del motor. Aprovechando el estator y rotor ambos de acero laminado al
silicio se produce un campo magnético uniforme en el motor.
Partiendo del hecho de que cuando pasa corriente por un conductor produce un campo magnético, además si lo ponemos dentro de la acción de un campo magnético
potente, el producto de la interacción de ambos campos magnéticos hace
que el conductor tienda a desplazarse produciendo así la energía
mecánica. Dicha energía es comunicada al exterior mediante un dispositivo llamado flecha.
Motores de corriente continua
Los motores de corriente continua se clasifican según la forma como estén conectados, en:
- Motor serie
- Motor compound
- Motor shunt
- Motor eléctrico sin escobillas
Además de los anteriores, existen otros tipos que son utilizados en electrónica:
- Motor paso a paso
- Servomotor
- Motor sin núcleo
Motores de corriente alterna
Los motores de C.A. se clasifican de la siguiente manera:
Asíncrono o de inducción
Los motores asíncronos o de inducción son aquellos motores eléctricos en
los que el rotor nunca llega a girar en la misma frecuencia con la que
lo hace el campo magnético del estator. Cuanto mayor es el par motor
mayor es esta diferencia de frecuencias.
Jaula de ardilla

Un rotor de jaula de ardilla es la parte que rota usada comúnmente en
un motor de inducción de corriente alterna. Un motor eléctrico con un
rotor de jaula de ardilla también se llama "motor de jaula de ardilla".
En su forma instalada, es un cilindro montado en un eje. Internamente
contiene barras conductoras longitudinales de aluminio o de cobre con
surcos y conectados juntos en ambos extremos poniendo en cortocircuito
los anillos que forman la jaula. El nombre se deriva de la semejanza
entre esta jaula de anillos y barras y la rueda de un hámster (ruedas
probablemente similares existen para las ardillas domésticas)
Anteriormente se usaban rotores con barras conectadas entre si con
tuercas lo que da problemas cuando perdían presión y provocan mal
contacto. Eso se mejoro usando jaulas de ardilla sin tuercas, son de
material fundido, en el futuro se pretende utilizar cobre en la jaula
para mejorar la eficiencia, actualmente se utiliza aluminio.
Monofásicos
- Motor de arranque a resistencia. Posee dos bobinas una de arranque y una bobina de trabajo.
- Motor de arranque a condensador. Posee un condensador electrolítico en serie con la bobina de arranque la cual proporciona más fuerza al momento de la marcha y se puede colocar otra en paralelo la cual mejora la reactancia del motor permitiendo que entregue toda la potencia.
- Motor de marcha.
- Motor de doble condensador.
- Motor de polos sombreados o polo sombra.
Trifásicos
- Motor de Inducción.
A tres fases
La mayoría de los motores trifásicos tienen una carga equilibrada, es
decir, consumen lo mismo en las tres fases, ya estén conectados en
estrella o en triángulo. Las tensiones en cada fase en este caso son
iguales al resultado de dividir la tensión de línea por raíz de tres.
Por ejemplo, si la tensión de línea es 380 V, entonces la tensión de cada fase es 220 V.
Véase también: Sistema trifásico
Rotor Devanado
El rotor devanado o bobinado, como su nombre lo indica, lleva unas
bobinas que se conectan a unos anillos deslizantes colocados en el eje;
por medio de unas escobillas se conecta el rotor a unas resistencias que
se pueden variar hasta poner el rotor en corto circuito al igual que el
eje de jaula de ardilla.
Monofásicos
- Motor universal
- Motor de Inducción
- Motor de fase partida
- Motor por reluctancia
- Motor de polos sombreados
Trifásico
- Motor de rotor devanado.
- Motor asíncrono
- Motor síncrono
Síncrono
En este tipo de motores y en condiciones normales, el rotor gira a
las mismas revoluciones que lo hace el campo magnético del estator.
Usos
Los motores eléctricos se utilizan en la gran mayoría de las máquinas
modernas. Su reducido tamaño permite introducir motores potentes en
máquinas de pequeño tamaño, por ejemplo taladros o batidoras.
Cambio de sentido de giro
Para efectuar el cambio de sentido de giro de los motores eléctricos
de corriente alterna se siguen unos simples pasos tales como:
- Para motores monofásicos únicamente es necesario invertir las terminales del devanado de arranque, esto se puede realizar manualmente o con unos relevadores
- Para motores trifásicos únicamente es necesario invertir dos de las conexiones de alimentación correspondientes a dos fases de acuerdo a la secuencia de trifases.
- Para motores de a.c. es necesario invertir los contactos del par de arranque.
Regulación de velocidad
En los motores asíncronos trifásicos existen dos formas de poder
variar la velocidad, una es variando la frecuencia mediante un equipo
electrónico especial y la otra es variando la polaridad gracias al
diseño del motor. Esto último es posible en los motores de devanado
separado, o los motores de conexión Dahlander pero solo es posible tener un cambio de polaridad limitado ejem: 2 polos y 4.
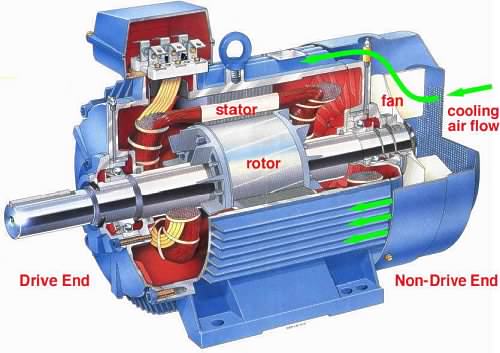
Partes de un motor

El
principio de funcionamiento de lo motores Asincrónicos esta basado en la
producción de un campo magnético giratorio. Consideremos un imán
permanente A y un disco de cobre que pueda girar alrededor de un eje B.
Cuando el imán movido por un artificio cualquiera, gira, el campo
producido gira igualmente y barre el disco.
Este es recorrido
ahora por corrientes inducidas debido a la rotación del campo magnético
creado por el imán. Estas corrientes reaccionan sobre el campo dando un
par motor suficiente para vencer el par resistente debido a los
rozamientos y provocar la rotación del disco. El sentido de rotación,
indicado por la ley de Lenz, tiende a oponerse a la variación del campo
magnético que a dado origen a las corrientes. El disco es pues movido en
el sentido del campo giratorio y por eso este tipo de motor se llama
Asincróno.
En el caso del motor de jaula de ardilla las barras
metálicas que constituyen la jaula de ardilla están cortadas por el
campo giratorio producido por el estator, lo que origina corrientes
inducidas intensas. Estas reaccionan sobre el campo giratorio dando un
oar motor que provoca la rotación de la jaula.
- ROTOR
El
rotor esta formado por chapas magnéticas, barras conductoras y aletas
de ventilación, tal como lo muestra la figura anterior. Este esta
constituido por tres partes principales
- ESTATOR
- CARCAZA
- TAPAS O ESCUDOS
ESPARRAGOS DE SUJECIÓN DEL MOTOR : Son cuatro, con hilos en cada extremo. El principal objetivo es montar dar apriete al conjunto centradamente.
Arranque de los
motores
Durante la puesta en tensión de un motor,
la corriente solicitada es considerable y puede provocar una caída de tensión
que afecte al funcionamiento de los receptores, especialmente en caso de
insuficiencia de la sección de la línea de alimentación. En ocasiones, la caída
puede llegar a ser perceptible en los aparatos de alumbrado.
Para poner remedio a estos
inconvenientes, ciertos reglamentos sectoriales prohíben el uso de motores de
arranque directo que superen cierta potencia. Otros se limitan a imponer la
relación entre la corriente de arranque y la nominal en base a la potencia de
los motores
Arranque directo
Se trata del modo de arranque más
sencillo en el que el estator se acopla directamente a la red. El motor se basa
en sus características naturales para arrancar.
En el momento de la puesta bajo
tensión, el motor actúa como un transformador cuyo secundario, formado por la
jaula muy poco resistente del rotor, está en cortocircuito. La corriente
inducida en el rotor es importante. La corriente primaria y la secundaria son
prácticamente proporcionales.
Por tanto, se obtiene una punta de
corriente importante en la red:

Arranque estrella-triángulo
Sólo es posible utilizar
este modo de arranque en motores en los que las dos extremidades de cada uno de
los tres devanados estatóricos vuelvan a la placa de bornas. Por otra parte, el
bobinado debe realizarse de manera que el acoplamiento en triángulo corresponda
con la tensión de la red: por ejemplo, en el caso de una red trifásica de 380
V, es preciso utilizar un motor bobinado a 380 V en triángulo y
660 V en estrella.

Arranque de motores de
devanados partidos “part-winding”
Este tipo de motor está
dotado de un devanado estatórico desdoblado en dos devanados paralelos con seis
o doce bornas de salida. Equivale a dos “medios motores” de igual potencia.
Durante el arranque, un
solo “medio motor” se acopla en directo a plena tensión a la red, lo que divide
aproximadamente por dos tanto la corriente de arranque como el par. No
obstante, el par es superior al que proporcionaría el arranque estrella-triángulo
de un motor de jaula de igual potencia.
Al finalizar el arranque,
el segundo devanado se acopla a la red. En ese momento, la punta de corriente
es débil y de corta duración, ya que el motor no se ha separado de la red de
alimentación y su deslizamiento ha pasado a ser débil.
Este sistema, poco
utilizado en Europa, es muy frecuente en el mercado norteamericano (tensión de
230/460 V, relación igual a 2).

Arranque estatórico por
resistencias
El principio consiste en arrancar el
motor bajo tensión reducida mediante la inserción de resistencias en serie con
los devanados.
Una vez estabilizada la velocidad, las
resistencias se eliminan y el motor se acopla directamente a la red.
Normalmente, se utiliza un temporizador para controlar la operación.
Durante este tipo de arranque, el
acoplamiento de los devanados del motor no se modifica. Por tanto, no es
necesario que las dos extremidades de cada devanado sobresalgan de la placa de
bornas.

Arranque por
autotransformador

El motor se alimenta a tensión
reducida mediante un autotransformador que, una vez finalizado el arranque,
queda fuera del circuito.
El arranque se lleva a cabo en tres
tiempos:
– en el primer tiempo, el
autotransformador comienza por acoplarse en estrella y, a continuación, el
motor se acopla a la red a través de una parte de los devanados del
autotransformador. El arranque se lleva a cabo a una tensión reducida que se
calcula en función de la relación de transformación. Generalmente, el
transformador está dotado de tomas que permiten seleccionar la relación de
transformación y, por tanto, el valor más adecuado de la tensión reducida.
– antes de pasar al acoplamiento a
plena tensión, la estrella se abre. En ese momento, la fracción de bobinado
conectada a la red crea una inductancia en serie con el motor. Esta operación
se realiza cuando se alcanza la velocidad de equilibro, al final del primer
tiempo.
– el acoplamiento a plena tensión
interviene a partir del segundo tiempo, normalmente muy corto (una fracción de
segundo). Las inductancias en serie con el motor se cortocircuitan y, a
continuación, el autotransformador queda fuera del circuito.
Este modo de arranque suele utilizarse
en los motores con potencia superior a 100 kW. Sin embargo, el precio de los
equipos es relativamente alto debido al elevado coste del autotransformador.
Un motor de anillos no puede arrancar
en directo (devanados rotóricos cortocircuitados) sin provocar puntas de
corriente inadmisibles. Es necesario insertar en el circuito rotórico
resistencias que se cortocircuiten progresivamente, al tiempo que se alimenta
el estator a toda la tensión de red.
El cálculo de la resistencia insertada
en cada fase permite determinar con rigor la curva de par-velocidad resultante:
para un par dado, la velocidad es menor cuanto mayor sea la resistencia. Como
resultado, la resistencia debe insertarse por completo en el momento del
arranque y la plena velocidad se alcanza cuando la resistencia está
completamente cortocircuitada.
La corriente absorbida es
prácticamente proporcional al par que se suministra. Como máximo, es
ligeramente superior a este valor teórico.
EN DAVANADO PARTIDO Y CONECTADO A UN ARRANCADOR A TENSION PLENA SE UNEN T1 con T7 a L1 T2 con T8 a L2 y T3 con T9 a L3, es correcto?
ResponderEliminartienes mas informacion o solo es de motores y muy bueno tu blog felicidades
ResponderEliminarExcelente trabajo, muy completo, felicidades
ResponderEliminar